岡山天体物理観測所188cm望遠鏡は、2013年に駆動系および制御系の改修を実施し、近年のサイエンスから要求される観測時の高い駆動性能を獲得した。過去の2回の改修(湯谷他, 1988; 佐々木, 1988; Yoshida et al., 2002)に比較すると、天体観測に直結する駆動伝達機構を大幅に変更した点が異なる。この改修は、科学研究費補助金(科学研究 費補助金基盤研究 (A)「太陽系外惑星系探索の自動化」(代表:泉浦秀行, 平成 23 - 27 年度))によるもので、最大の目標は観測の自動化を見据えた望遠鏡駆動の信頼性の向上と高精度化、高速化を図ることであった。この改修によって、共同利用観測時にリモートサイトからの観測やキューモード観測が実施可能になった。
188cm望遠鏡は、50年以上前の技術で建設され、主に指向時に使う粗動と天体追尾やディザリングを行う微動の2つの駆動系をもつ。改修の向けた事前調査で、主要な駆動構造は近年の天体観測の要求精度を満たすことが分かったため、そのまま利用することにした。したがって、本改修における主要な改良箇所は、観測時の性能に直接影響する微動系と焦点調節駆動機構であった(図1)。

図1:188cm望遠鏡の主な改修箇所
(a)赤緯軸微動、(b)赤緯軸粗動、駆動切換電磁クラッチ機構、(c)赤経軸高分解能エンコーダ、(d)赤経軸粗動、駆動切換電磁クラッチ機構、(e)赤緯軸微動、(f)赤緯軸高分解能エンコーダ、(g)カセグレンローテータ駆動モーター、(h)主鏡カバー駆動モーター、傾斜センサー、(i) 焦点調節駆動機構
旧来、微動系は複数台のモーターを複雑なギアで構成された差動装置で切り換えることで、恒星時追尾、天体のガイド、数秒角の低速駆動など様々な速度域に対応していた。このような機構は、周期的変位やバックラッシュを伴い駆動性能の劣化要因であった。今回の改修では、現代的な速度ダイナミックレンジの広い高精度サーボモーターの動力を直接駆動シャフト(赤経軸:ウォームギア、赤緯軸:タンジェンシャルスクリュー)に伝達する仕組みに変更することで、微動系の動力伝達を単純化した。
焦点調節駆動機構は、改修前の点で支持する金属同士の嵌合構造から、高剛性のリニアガイドステージ上に面で支持する構造に更新した。スパイダーで筒先に固定する外箱と副鏡セルを取付ける冶具は再利用したため外観は変わらない。その他、駆動系の切り換えは電磁クラッチを導入、配線はすべて新規に敷線、粗動、焦点調節駆動機構、カセグレンローテータ、主鏡ミラーカバーの動力をサーボモーターに更新した。
望遠鏡の姿勢制御は、赤経軸と赤緯軸に直結した実効分解能0.06秒角をもつ高分解能エンコーダの計測値を元に、実際の軸の動きを追従するようにフィードバックをかけながら駆動を行う仕組みを導入した。エンコーダの位置読み取りヘッドと本体は独立に取り付ける仕様のため、その相対位置変化がエンコーダ出力に影響する。そこで東西対向に位置読み取りヘッドを搭載し、エンコーダ読み取り精度の劣化を防ぐ対策をした。このフィードバック制御は、西村製作所が経緯台望遠鏡用に開発したコントローラを今回初めて赤道儀望遠鏡に適用していて、100ミリ秒のサイクルで命令値と現在値の差分がなくなるように駆動する。これにより、望遠鏡姿勢の精密な位置測定を元に、高精度に望遠鏡を駆動することが可能なシステムが構築された。
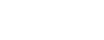
共同利用観測者が望遠鏡操作に使用していた旧来のソフトウェアcont74は、ソケット通信の仕様を踏襲し描画と操作性を向上させたncont74としてアップグレードした。ncont74は、新しい望遠鏡制御システムと同時期に制御系を更新した188cm望遠鏡ドーム、既存の共同利用観測装置、キュー観測システムの双方向通信機能を補完する接続インターフェースとしての役割を果たす(図2)。
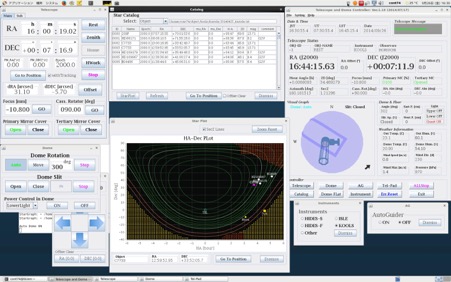
図2:観測者が利用するncont74の操作画面
改修によって構築された新たな望遠鏡の駆動および制御システムが、どのような駆動性能をもつか、旧システムの課題が解消されているか駆動性能の検証と評価を行った。更新された望遠鏡駆動のスペックは、新旧の比較として表1にまとめ、以下に主要な性能について記載する。
| 改修前 | 改修後 | |
| 赤経軸 | ||
| 粗動最大速度 | 0.7度/秒 | 1.5度/秒 |
| 微動最大速度 | 18秒角/秒 | 600秒角/秒 |
| エンコーダ分解能 | ||
| 赤緯軸 | ||
| 粗動最大速度 | 0.7度/秒 | 1.0度/秒 |
| 微動最大速度 | 18秒角/秒 | 100秒角/秒 |
| エンコーダ分解能 | ||
| 指向精度 | ||
| カセグレン焦点 | 17.2秒角RMS | 9.7秒角RMS |
| ガイド望遠鏡 | 10.9秒角 RMS | 1.2秒角RMS |
| 指向時間(離角20度) | 102秒 | 16秒 |
| 追尾精度 | ||
| カセグレン焦点 | 3秒角/3分間 | 1秒角/3分間 |
| ガイド望遠鏡 | ||
| 微小角駆動精度 | ~数秒角 | 0.3秒角RMS |
| 合焦時星像安定度 | > 10秒角 | 2秒角 |
指向精度の検証は、カセグレン焦点の観測装置による検証に加え、鏡筒に設置した口径10cmのガイド望遠鏡を使用して改修対象であった駆動系のみの検証を行った。いずれも約100天体についてデータを取得して、望遠鏡指向解析ソフトTPOINTを使って解析を行った。図3に示すように、改修前後で同じ13個のパラメータをモデルフィットの残差(RMS)は、カセグレン焦点で9.7秒角(改修前17.2秒角)、ガイド望遠鏡で1.2秒角(改修前10.9秒角)という結果を得た。ガイド望遠鏡は望遠鏡のメカニカルな性能の指標であり、カセグレン焦点の指向性能は、主鏡・副鏡の光学系に由来する劣化要因があると考えられる。
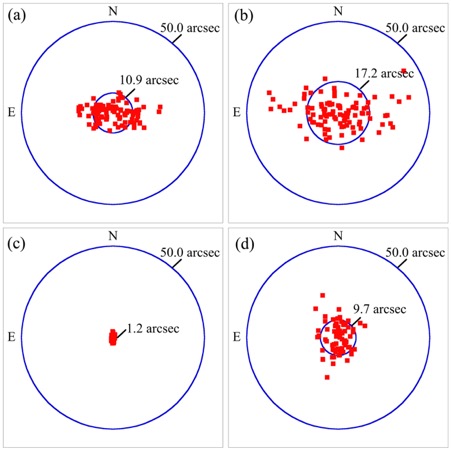
図3:TPOINT による指向解析結果 (RMS)
(a) は改修前ガイド望遠鏡、(b) は改修前カセグレン焦点、(c) は改修後ガイド望遠鏡、(d) は改修後カセグレン焦点の結果を示す。
望遠鏡の指向速度は、実際の観測ログからターゲットまでの角距離と指向時間を評価した。図4に示すように、指向時間は従来の1/4と大幅に改善した。駆動モーター更新によって粗駆の最高速度が約2倍になっているが、その他にさらに2倍速くなったことを意味する。また、図4のデータ点のばらつきの減少から、毎回の指向の安定性が向上して信頼性も高くなった。
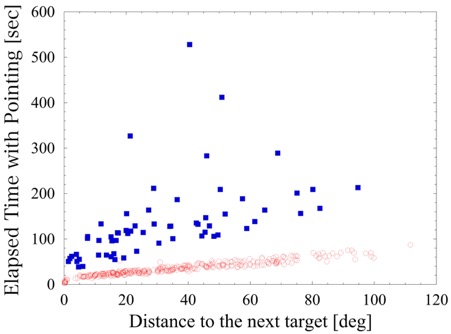
図4:改修前と改修後の観測時の指向時間の比較
縦軸は指向開始から追尾開始までの経過時間、横軸はターゲットまでの角距離を示す。改修前のデータ点は青四角、改修後は赤丸で示す。
メカニカルな天体追尾の性能試験はガイド望遠鏡を使用し、オープントラックしながら30Hzの頻度で星像の変位を計測した。旧システムでみられた赤経方向のうねりや赤緯方向の周期的なスパイクパターンはなくなり、改修後の変位はスムースな単調変化のトレンドが得られた(図5)。同様な試験はカセグレン焦点でも実施して、改修後においても望遠鏡の姿勢によって30分間で最大10秒角程度のドリフトが確認された。追尾中のエンコーダフィードバック制御による命令値と目標値のずれは0.1-0.2秒角に収まっているので、このドリフトも光学系由来と判断している。
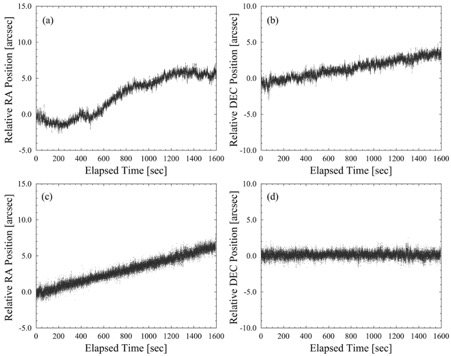
図5:赤経軸と赤緯軸の追尾試験の改修前後の比較
(a)は改修前赤経方向、(b)は改修前の赤緯方向、(c)は改修後の赤経方向、(d)は改修前の赤緯方向の追尾中の相対位置変化を示す。 縦軸は相対変位、横軸は追尾時間を示す。
ディザリングや天体を任意の位置に導入する際など、観測視野内で精密に動かす際に使用する微小角移動の検証は、微動系によって行われ、命令値に対する誤差が約0.3秒角RMSと高精度化を達成した。旧来は、とくに赤緯軸でバックラッシュの影響が顕著であり、移動方向が変わる部分では命令値と移動量の差が大きく、図6中でも差分が明らかに分かる状態であった。
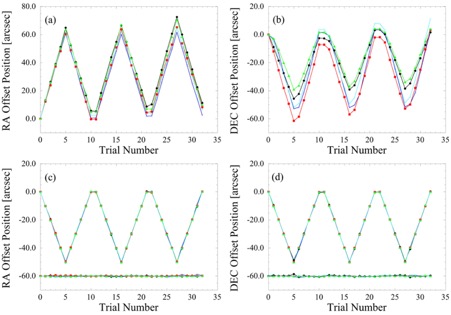
図6:微小角移動性能の比較
(a)は赤経方向(改修前)、(b)は赤緯方向(改修前)、(c)は赤経方向(改修後)、(d)は赤緯方向(改修後)を示す。縦軸はそれぞれの軸の移動量、横軸は試行した回数である。(c)と(d) には、命令値と移動値の残差かが、-60秒角オフセットしてプロットしてある。それぞれ、赤四角は東、黒丸は西、青バツは南、緑三角は北、水色十字は天頂に望遠鏡を向けデータを取得した。
焦点位置の調整による同一方向へ駆動した際の結像位置は、0.3秒角RMS/mm、最大差は1.4秒角と得られた。また、駆動方向の逆転時に改修前には10秒角以上の飛びがあったが、改修後には平均値で0.4秒角の中に収まるようになった(図7)。副鏡がどの位置にあっても、また望遠鏡の姿勢によらず、円滑な動きができるようになったといえる。
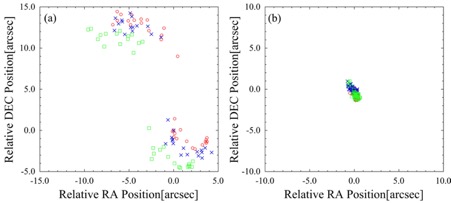
図7:改修前後の副鏡焦点調節試験の比較
(a)は改修前、 (b)は改修後の結像位置の相対変位を示す。縦軸は赤緯方向の相対値、横軸は赤経方向の相対値である。
以上のように、本改修によって望遠鏡の機械・駆動系由来の誤差は解消し高性能化と信頼性が向上した。2016年より遠隔地からのリモート観測、キューモード観測などが実施できるようになった。本改修についての詳細は、国立天文台報に報告済みである。
参考文献
湯谷正美, 佐々木敏由紀, 清水康廣, 渡辺悦二, 1988, 天文学に関する技術シンポジウム 1988 集録, p. 66
佐々木敏由紀, 1988, 天文学に関する技術シンポジウム 1988 集録, p.69
Yoshida, M., Shimizu, Y., Watanabe, E., Yanagisawa, K., and Uraguchi, F., 2002, New Control Software of the 188-cm Telescope of Okayama Astrophysical Observatory, Advanced Telescope and Instrumentation Control Software II, ed. Lewis, Hilton, 4848, p. 425-433.
黒田大介, 泉浦秀行, 柳澤顕史, 神戸栄治, 小矢野 久, 福井暁彦, 筒井寛典, 浮田信治,沖田喜一, 戸田博之, 坂本彰弘, 今田 明, 清水康廣, 2015, 国立天文台報, 17, 19-39.